|
|
Maschinen von GoCNC mit Arduino UNO verbinden
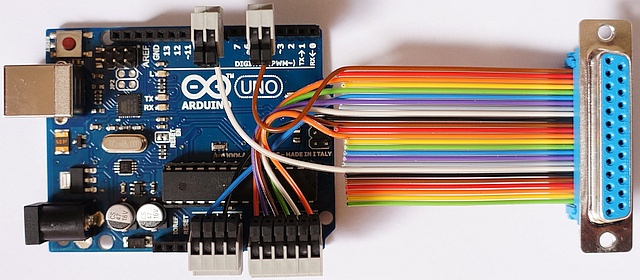
Auf dieser Seite zeige ich dir eine einfache Möglichkeit den Parallelportanschluss der Maschine mit einem Arduino zu verbinden.
Benötigte Teile:
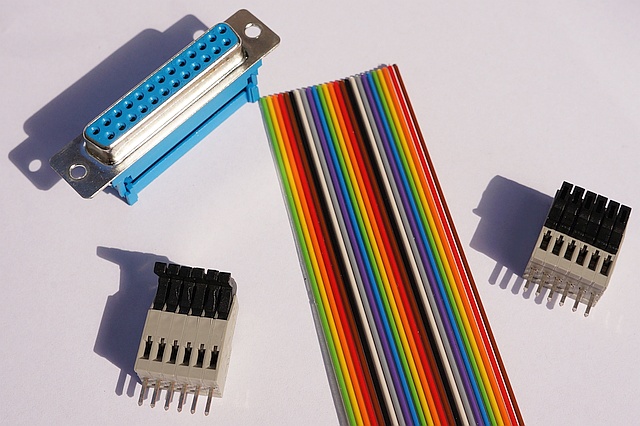
Flachbandstecker:
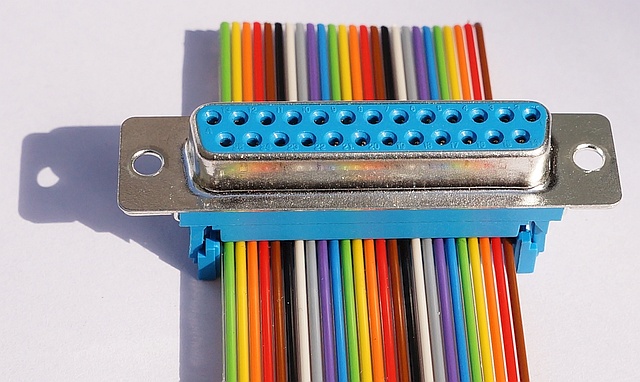
- Das Kabel wird so in den Stecker gelegt, dass die braune Ader rechts liegt wenn du wie im Bild gezeigt auf den Stecker blickst...
- Das zusammenpressen des Steckers erfordert relativ viel Kraft. Am einfachsten und gleichmäßigsten geht es mit einem Schraubstock...
- Auf der gegenüberliegenden Seite werden die einzelnen Adern auf ein paar cm Länge voneinander getrennt.
Das geht am einfachsten mit einer Schere oder Cuttermesser...
Trenne erst einmal nur die ersten 13 Adern von rechts (braun) beginnend...
Zählweise am Kabel:
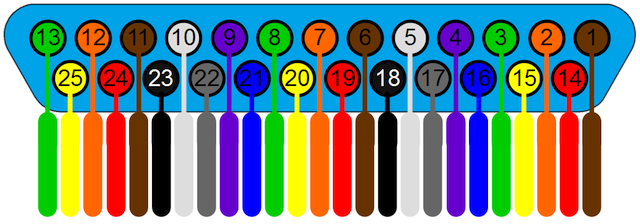
- Wie du siehst wechselt sich am Kabel immer ein Kontakt von oben mit einem von unten ab...
- Entsprechend wird mit braun beginnend von rechts nach links im Schema 1, 14, 2, 15, 3, 16, 4, 17 usw. gezählt...
Anschlussbelegung Estlcam:
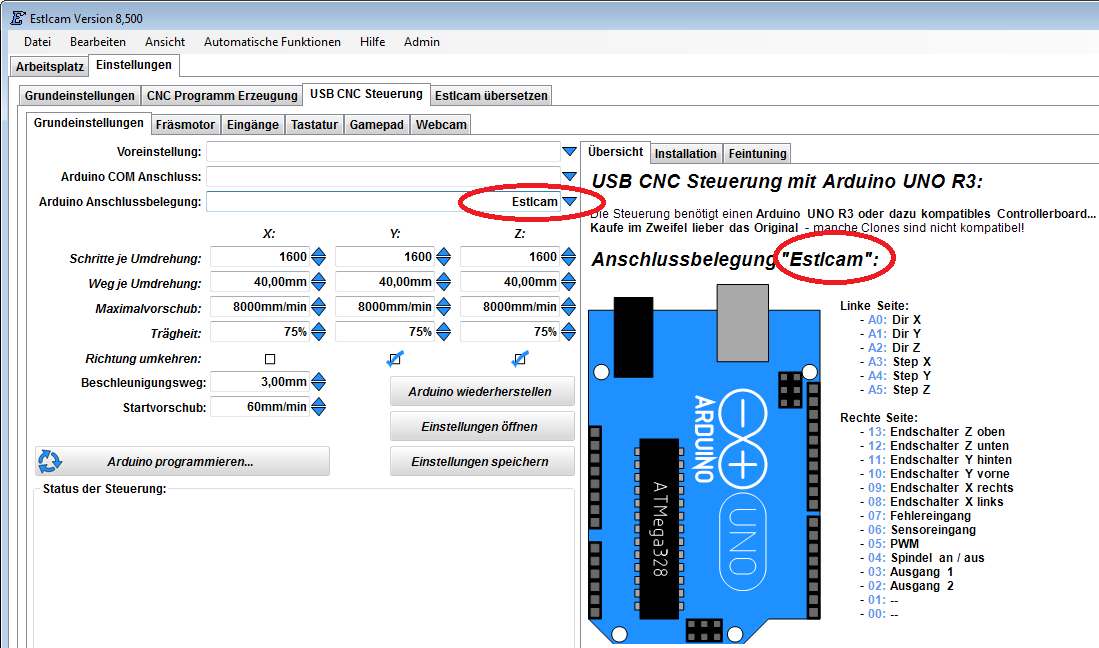
- Estlcam bietet mehrere Anschlussbelegungen zur Auswahl - hier im Beispiel geht es um die Original "Estlcam" Anschlussbelegung...
Masse / GND:
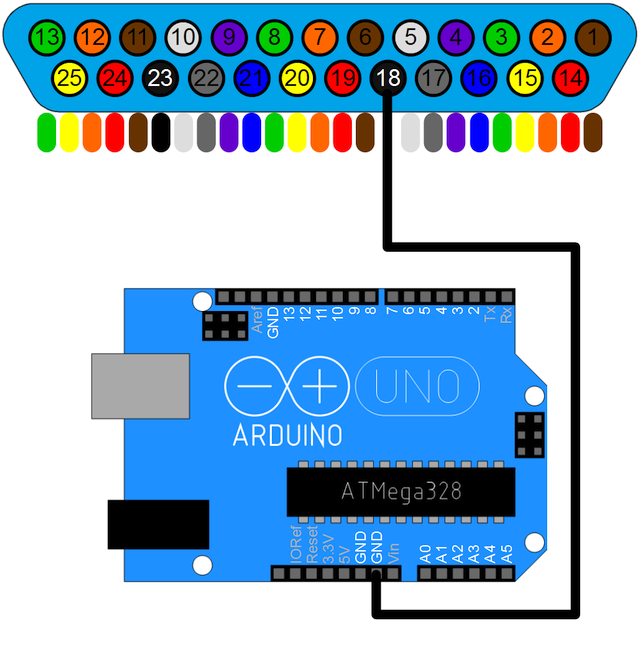
- Pins 18 bis 25 am Stecker sind alles Masseverbindungen...
- Es genügt eine beliebige davon mit "GND" am Arduino zu verbinden...
Richtungssignale:
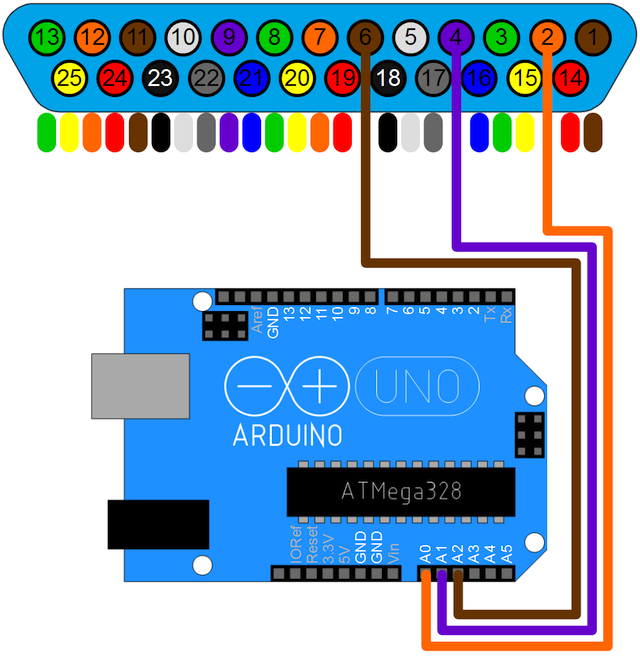
- Die Richtungssignale liegen auf Pins 2, 4 und 6 am Stecker...
- Und werden mit A0, A1 und A2 am Arduino verbunden...
- Die typische Bezeichnung für Richtungssignale in englischsprachigen Datenblättern ist "Dir" ("Dir X", "Dir Y", "Dir Z")...
Taktsignale:
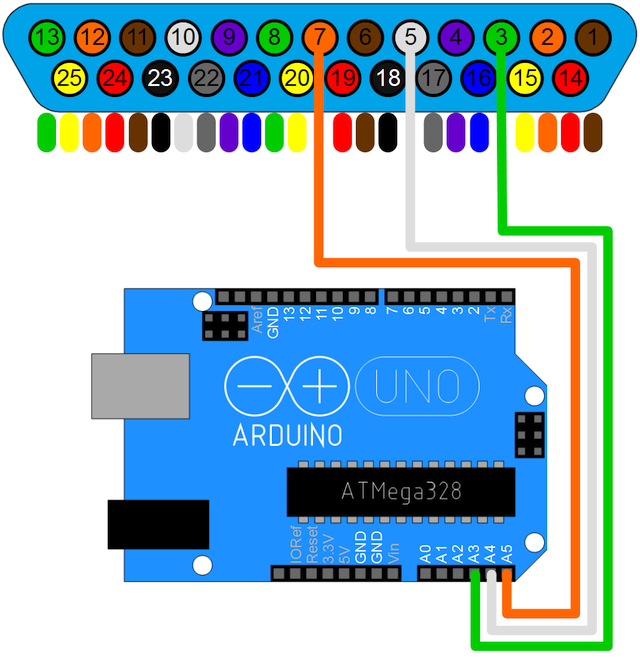
- Die Taktsignale liegen auf Pins 3, 5 und 7 am Stecker...
- Und werden mit A3, A4 und A5 am Arduino verbunden...
- Typische Bezeichnungen für Taktsignale in englischsprachigen Datenblättern sind "Step", "STP", "Pulse", "Pul", "Clock" oder "CLK"...
Fräsmotor / Endschalter / Bereitschaftssignal:
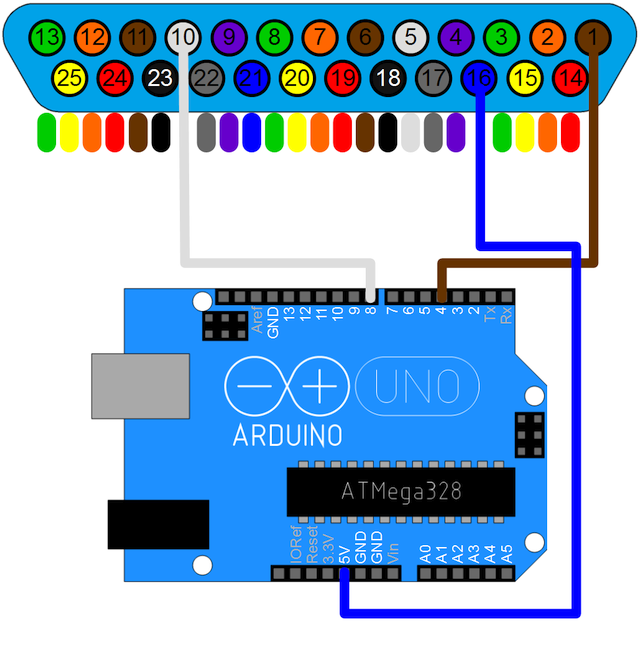
- Der Fräsmotor ist Pin 1 am Stecker und wird mit Anschluss 4 am Arduino verbunden...
- Endschalter ist Pin 10 am Stecker und wird mit Anschluss 8 am Arduino verbunden...
- Das Bereitschaftssignal an Pin 16 des Steckers wird mit 5V am Arduino verbunden...
|